
2 Apr
2013
2 Apr
'13
12:54 p.m.
Howdy Folks,
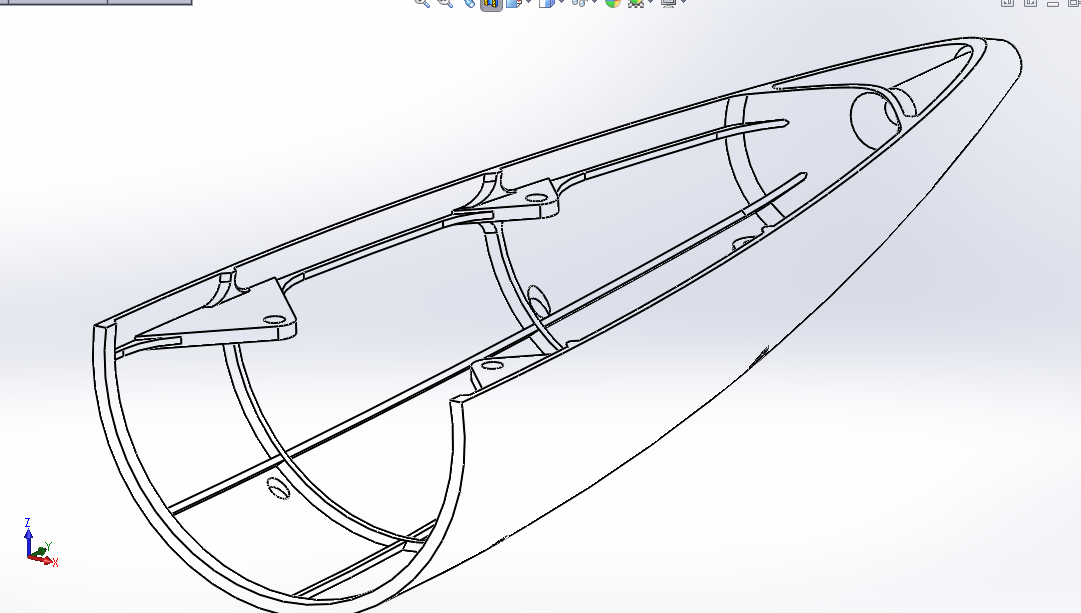
I was bored yesterday and added payload tabs to my current 65mm nose cone design, then
refined it with fillets and dimensional changes based on the black box (at least to me)
vibration analysis in solidworks. Long time no discussion RE rockets, but I recall from
our Intro to Rocketry meetup that people were interested in mounting various payloads such
as cameras, rovers, various flight control fixtures, even some more...creative...payloads
destined for Ace Monster Toys. Steve also had indicated the possibility of mounting his
ArduPilot for a gliding recovery after a passively stabilized ascent, which would involve
the awesome task of fabricating some deployable wings.
So my question to y'all is - what are the dimensions of the things you want to send up
as payloads? I'm thinking tabs with mounting holes for an arduino, ardupilot, or
standard sized customized protoboard are a must. The tip is designed to hold an airspeed
probe. I made a fuselage section out of cardboard that houses 4 micro servos for adding
steerable fins, but so far haven't had the chance to cut (or 3D print???) the fins to
go on it, and there are of course some safety concerns unless we take a trip to the
desert. Right now the mounting holes are at a 1.5"x2.5" spacing, but that can
easily be changed. Would like the next nose cone I print to be a final flight article and
I'd like to cram in as many payloads as possible without feeling like we're
putting too many eggs in the same basket. My most recent print is also a flight article,
and will go up with a minimal black box datalogger plus mass simulator for the final
payload assembly, to test stability and recovery before we send our shiny pretties
hurtling aboard. The way I see it, the more science we put on the rocket, the lower the
final altitude, and therefore the more places we can launch and still be able to recover.
Tabs are just one idea - there are infinite ways to strap stuff together, so any and all
input welcome. One point thing to remember is that there are almost no restrictions as
long as we limit power to a G-motor and mass to 1kg, so those are the design limits I
propose for the first system.
Also, let's schedule another rocketry meetup soon at the convenience of interested
parties.
Cheers,
Hol
{kind=link}